GARAGE TYPE
巷道堆垛
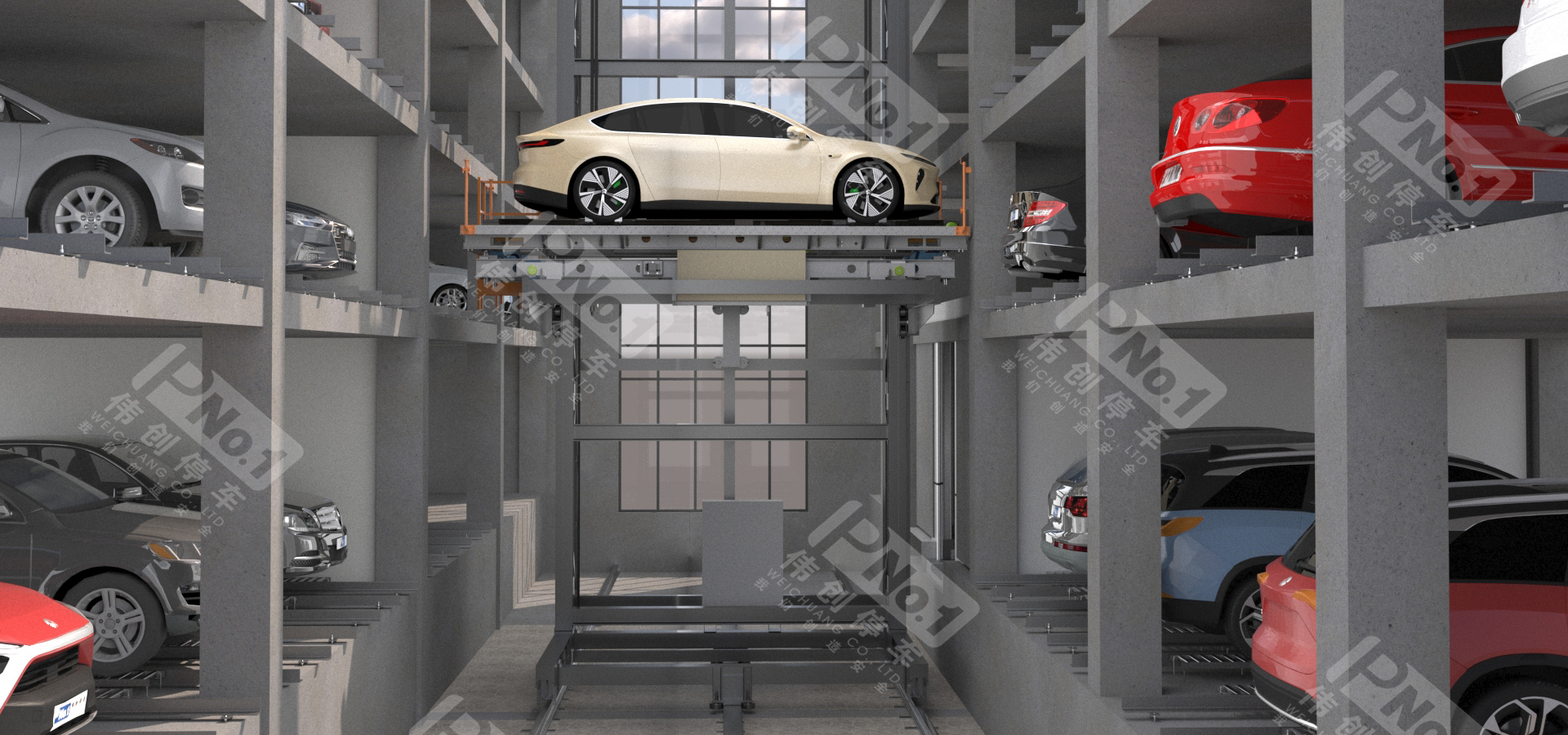
RENDERING
效果图


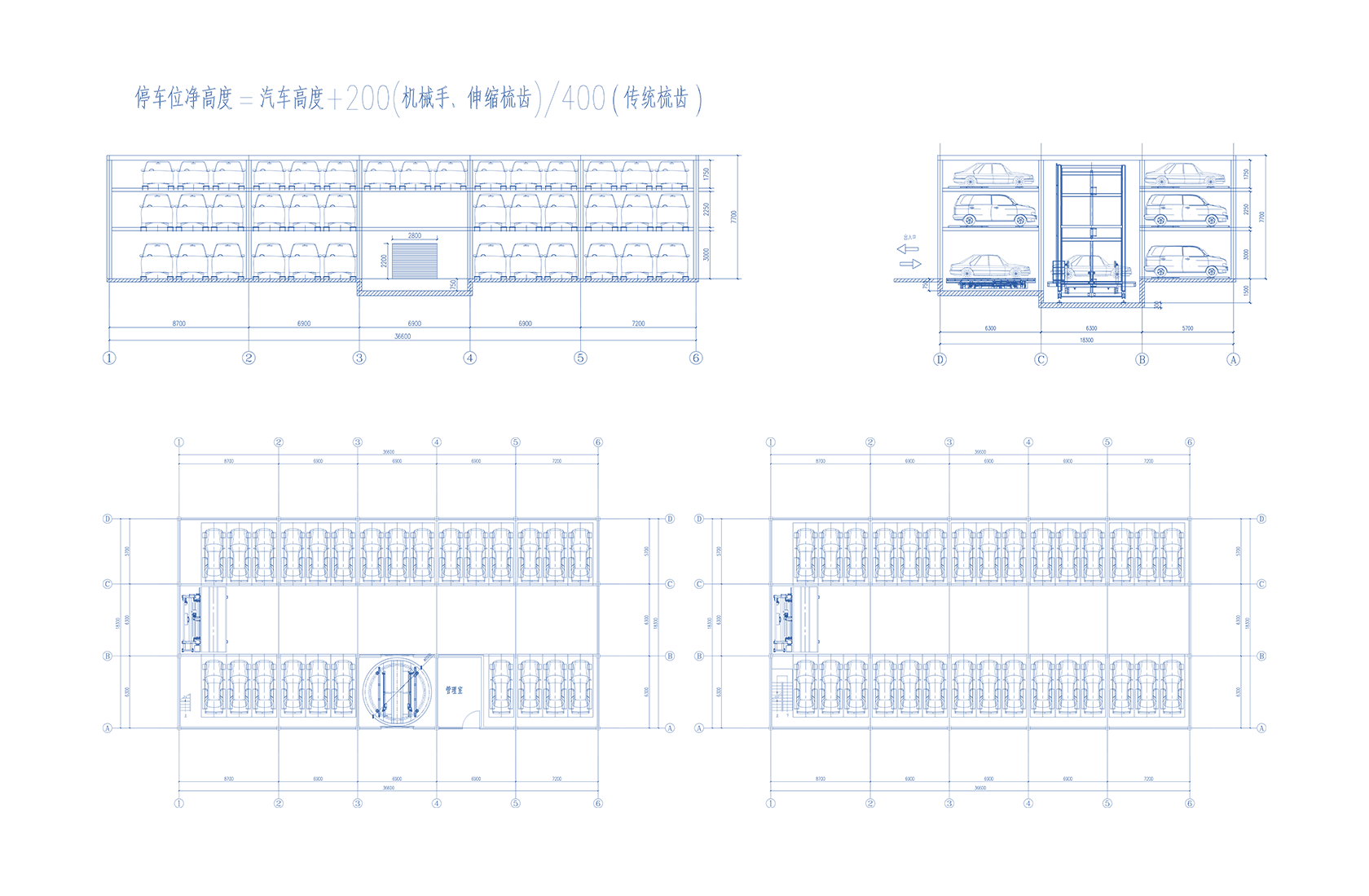
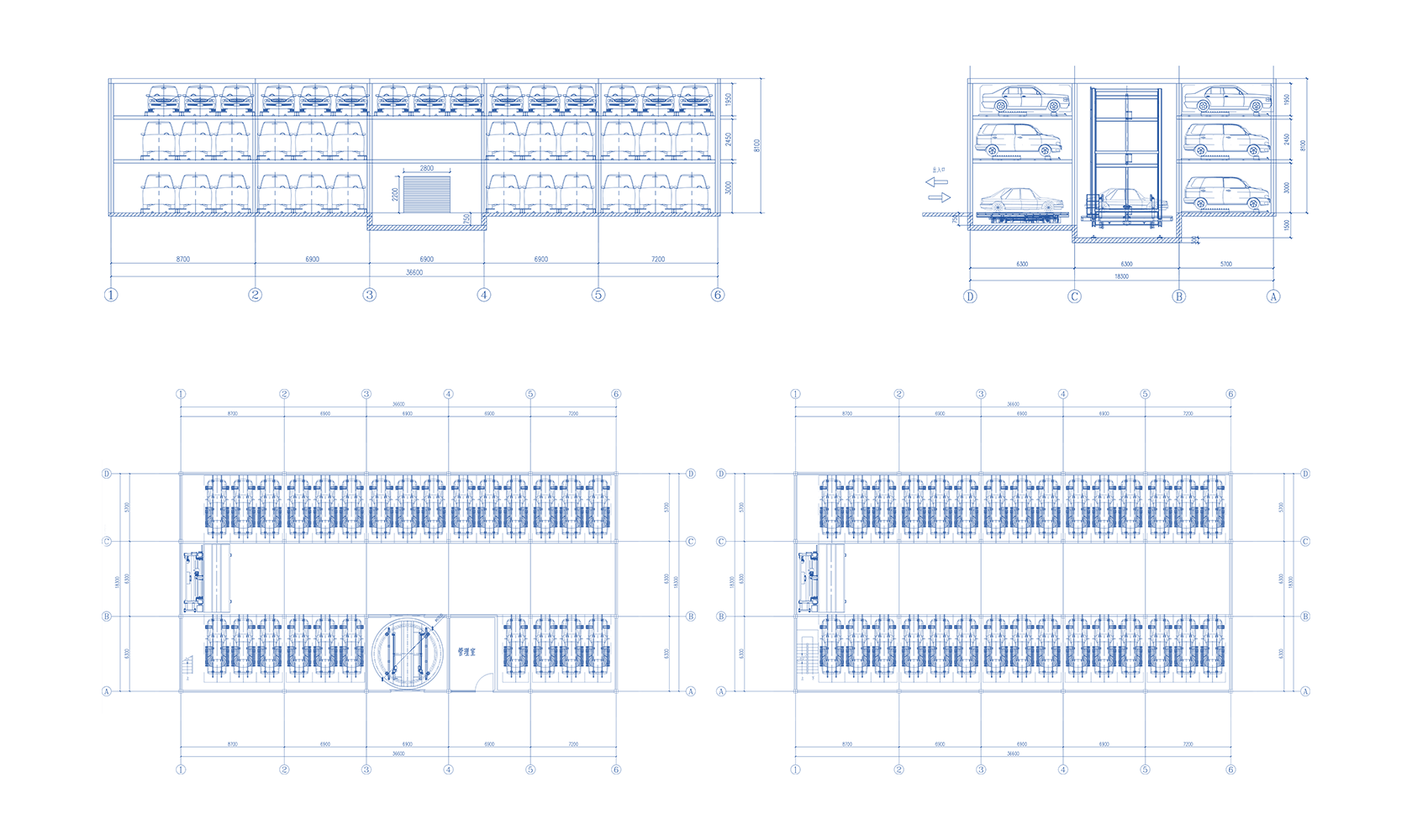
CAD STRUCTURAL DIAGRAM
CAD结构图
PARAMETER
设备参数
OPERATING PRINCIPLE
动作原理
SIMILAR CASES
同类型案例

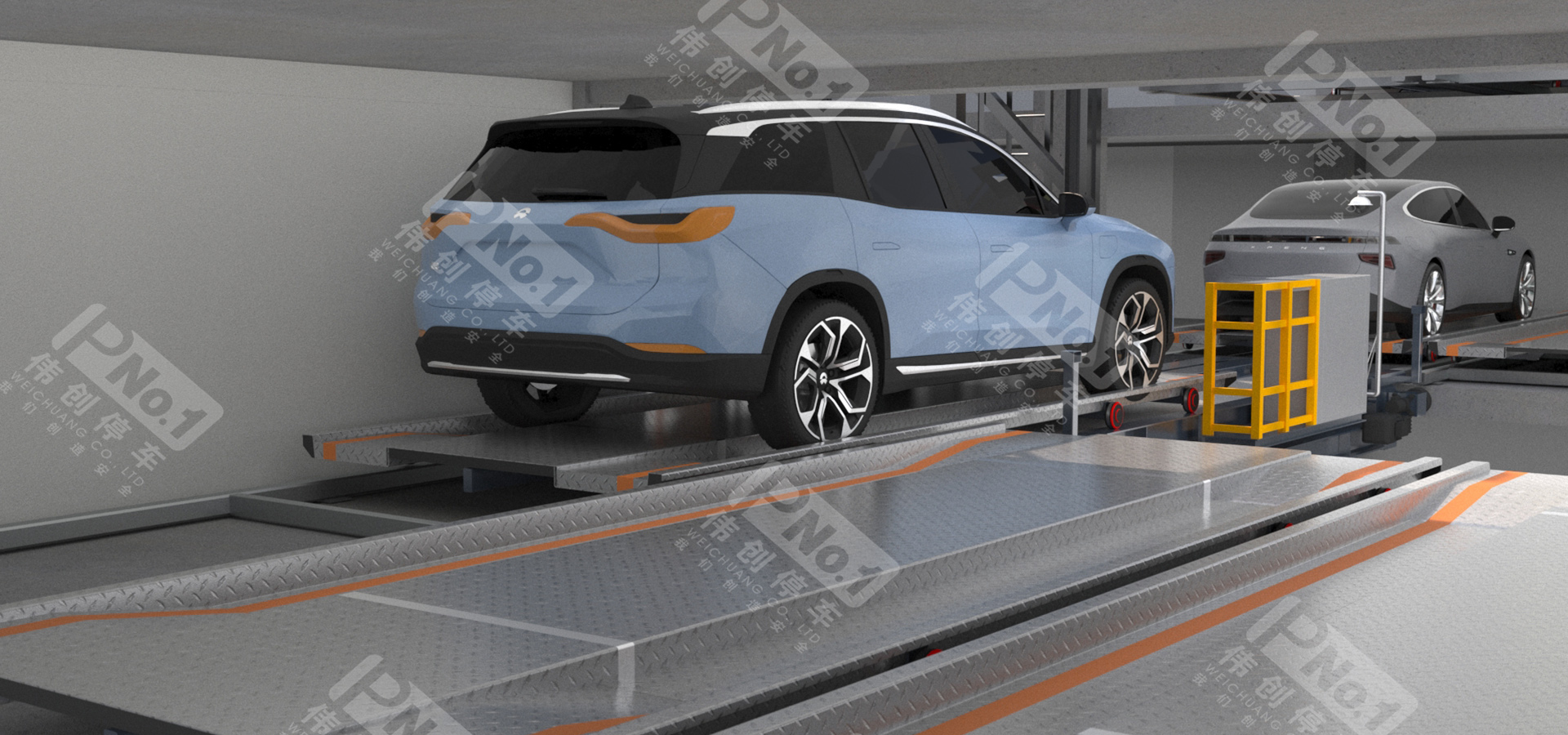
RENDERING
效果图


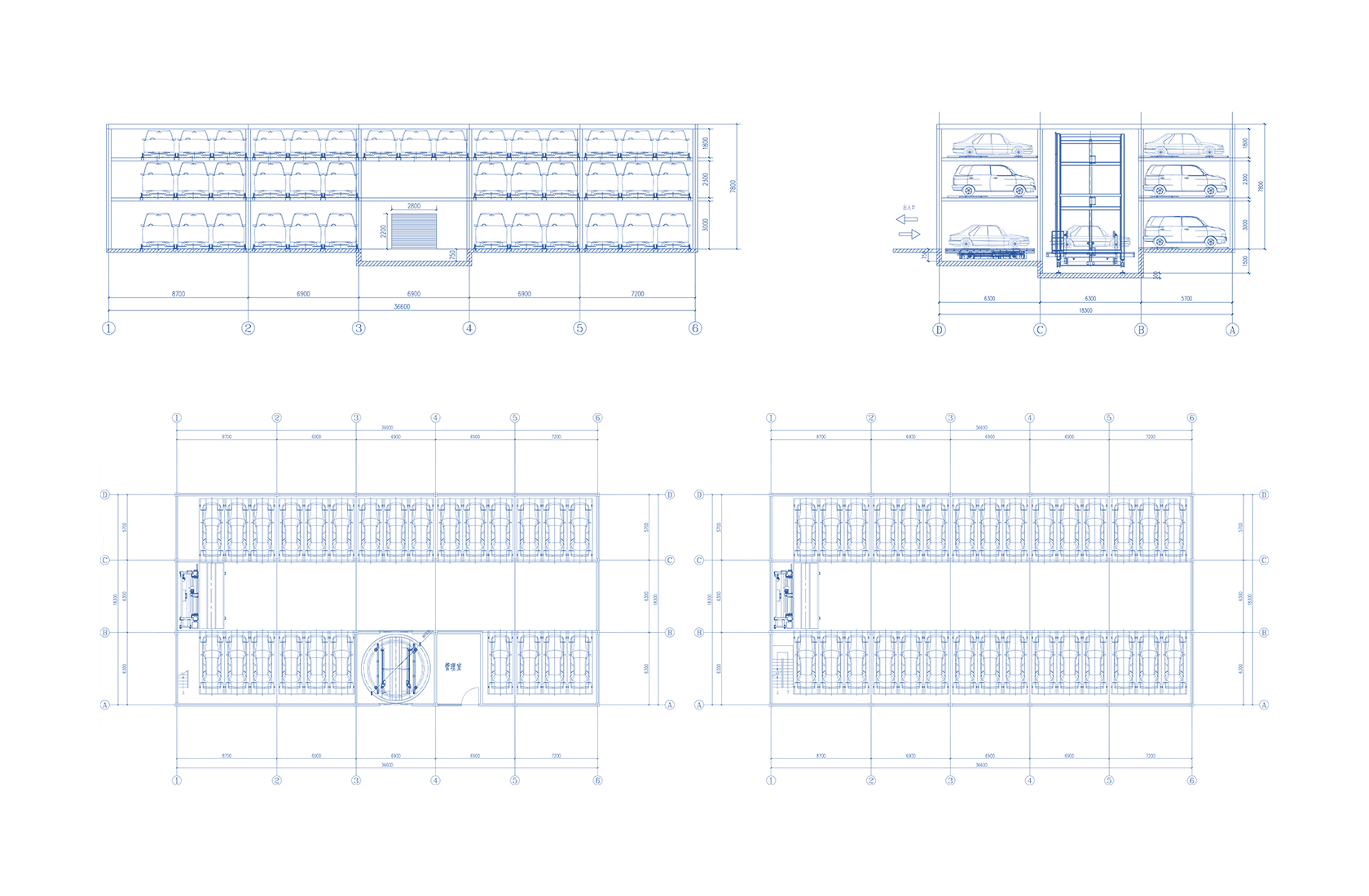
CAD STRUCTURAL DIAGRAM
CAD结构图
PARAMETER
设备参数
OPERATING PRINCIPLE
动作原理
SIMILAR CASES
同类型案例
RENDERING
效果图



CAD STRUCTURAL DIAGRAM
CAD结构图
PARAMETER
设备参数
OPERATING PRINCIPLE
动作原理
SIMILAR CASES
同类型案例

